旋转矩阵乘以一个点得出的是不是绕这个点旋转的图形
 hq123412022-10-04 11:39:541条回答
hq123412022-10-04 11:39:541条回答
旋转矩阵乘以一个点得出的是不是绕这个点旋转的图形
比如说y=x²+x绕点(-2,3)旋转180°,能否用旋转矩阵直接乘以(-2,3),再换算?
比如说y=x²+x绕点(-2,3)旋转180°,能否用旋转矩阵直接乘以(-2,3),再换算?
已提交,审核后显示!提交回复
共1条回复
 celisjhg 共回答了15个问题
celisjhg 共回答了15个问题 |采纳率100%- (-2,3)乘以旋转矩阵是把向量旋转
这种旋转180度的问题直接水平翻转再垂直翻转就好 - 1年前
相关推荐
- 请问旋转矩阵是否只存在平面,立体空间有没有旋转矩阵
向阳花1年前2
-
rr之客 共回答了18个问题
|采纳率88.9%三维旋转可以拆分成三个平面旋转的复合,你去看一下Euler角就明白了
一般n维欧氏空间里的旋转变换(行列式为1的正交变换)可以分解成不超过n(n-1)/2个平面旋转变换的乘积1年前查看全部
- 三维空间的旋转变换是否和3*3的旋转矩阵一一对应?
三维空间的旋转变换是否和3*3的旋转矩阵一一对应?
RTjarvis1年前1 -
fj15823 共回答了16个问题
|采纳率93.8%.这句话比较模糊,如果你说的是饶原点的旋转变换,任意一个三维空间的旋转变换可以对应一个3*3矩阵,但是只能说3*3矩阵包含这些旋转变换.而且三维空间中的任意一个转动变换都可以用两个转动轴,两个旋转角度来表示,总之很复杂,你可以去看看为什么没有三元数1年前查看全部
- 向量 乘以旋转矩阵的 置换是什么啊
向量 乘以旋转矩阵的 置换是什么啊
这是在剪切的矩阵变换遇到的问题
旋转阵R,y方向的剪切变换H,原点Q,点P,变换T,向量n,v
P=Q+y1n+y2v+y3(n*v)
y=[y1,y2,y3]
为什么
T(P)=Q+yHR
=Q+(P-Q)r(R的置换矩阵)HR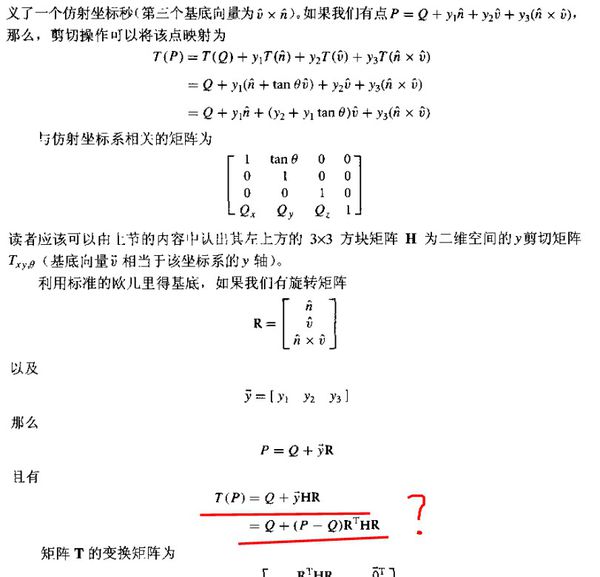 ww80051年前1
ww80051年前1 -
fswgwgh 共回答了23个问题
|采纳率87%那一步中有变形 根据 P=Q+YR
把y用Q R表示出来 再带到下面的式子就是了1年前查看全部
- 翻译大概是这样: 有两个矩阵M,N如下图所示。其中一个为反射矩阵,旋转矩阵。令X为旋转矩阵,Y为反射矩阵。a)
翻译大概是这样:
有两个矩阵M,N如下图所示。其中一个为反射矩阵,旋转矩阵。令X为旋转矩阵,Y为反射矩阵。
a)指出M和N哪个是旋转矩阵,哪个是反射矩阵。
b)有一最小正整数k,令x^k=I, I
是3*3的单位矩阵,
如图所示,
求k
c)解方程组,Xr=r 和Yr=r,r(如图)
求r的x,
z坐标
还有y在平面上的反射
d)我也不太懂,大概意思是,‘证明下面的集合能够通过矩阵乘法,组成一个群。你或许可以假设矩阵乘法是满足结合律,并且这里的I就是单位矩阵的意思。’
e)用特殊规则形状的对称租,集合法来解释这个群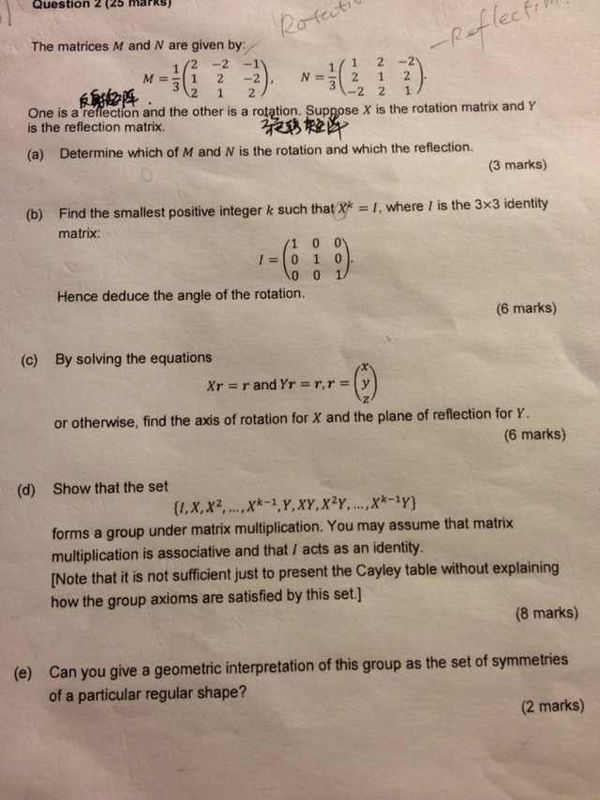
nwbh1年前3 -
weixiaoying 共回答了15个问题
|采纳率100%题目能够看懂,但矩阵实在不太会解……1年前查看全部
- 高中数学矩阵题这题我设x' y'是曲线上一点,然后这一点在旋转矩阵的变换作用下等于[x,y] (竖起来看),然后就得到如
高中数学矩阵题
这题我设x' y'是曲线上一点,然后这一点在旋转矩阵的变换作用下等于[x,y] (竖起来看),然后就得到如图的那一步,然后呢?该怎么办? roger12261年前1
roger12261年前1 -
藍天遐想 共回答了15个问题
|采纳率100%我发你QQ里了 QQ1年前查看全部
- 一个旋转矩阵问题同学给了我一个题目就是输入一个正整数n 比如n=4输出一个n*n的矩阵如下 1 2 3 412 13 1
一个旋转矩阵问题
同学给了我一个题目就是输入一个正整数n 比如n=4
输出一个n*n的矩阵如下
1 2 3 4
12 13 14 5
11 16 15 6
10 9 8 7
这个应该怎么写呢……又见谁的vv1年前1 -
everchan 共回答了17个问题
|采纳率94.1%递归写法,理论上有输入上限,不过一般也不会有那么大的输入
没有处理格式,没有处理输入,只写了算法...
class Program
{
private static void Fill(int[,] matrix,Direction direction,int start,
int rows,int cols,int rowOffset,int colOffset)
{
if (rows == 0 || cols == 0) return;
switch (direction)
{
case Direction.Left:
for (int n = cols; n > 0; )
matrix[rowOffset + rows - 1,colOffset + --n] = ++start;
Fill(matrix,Direction.Up,start,rows - 1,cols,rowOffset,colOffset);
break;
case Direction.Right:
for (int n = 0; n < cols; ++n)
matrix[rowOffset,colOffset + n] = ++start;
Fill(matrix,Direction.Down,start,rows - 1,cols,rowOffset + 1,colOffset);
break;
case Direction.Up:
for (int n = rows; n > 0; )
matrix[rowOffset + --n,colOffset] = ++start;
Fill(matrix,Direction.Right,start,rows,cols - 1,rowOffset,colOffset + 1);
break;
case Direction.Down:
for (int n = 0; n < rows; ++n)
matrix[rowOffset + n,colOffset + cols - 1] = ++start;
Fill(matrix,Direction.Left,start,rows,cols - 1,rowOffset,colOffset);
break;
}
}
enum Direction { Left,Right,Up,Down };
static void Main(string[] args)
{
int n = 4;
int[,] matrix = new int[n,n];
Fill(matrix,Direction.Right,0,4,4,0,0);
for (int i = 0; i < n; ++i)
{
for (int j = 0; j < n; ++j)
{
Console.Write(matrix[i,j] + " ");
}
Console.WriteLine();
}
Console.WriteLine();
}
}1年前查看全部
- 机器人理论方面的高人求解 1. 已知矩阵.(1)证明其是旋转矩阵; (2)求其等效转轴和等效转角;
27098658841年前0
-
共回答了个问题
|采纳率
大家在问
- 1一道数学题,大侠帮帮忙,一个密封的玻璃缸,最水的空间长6dm,高4dm,现在缸里水深3dm.如果缸竖起来,缸里水深多少米
- 2英语里加ES或者s规则变化和不规则变化的变化规则?
- 3白酒中的四大酸和四大酯分别是指哪些酸哪些酯啊?
- 4运动粘度单位cst的中文含义是什么?
- 5excel中的加法和sin函数的问题
- 6Shanghai haomo industry co,ltd的中文是什么
- 7一个正n边形的外角是内角的1/4,求这个多边形的内角和是多少度?
- 8化学式Feo No怎么读?在线等!~
- 9修一条公路,第一个月修了24千米,相当于全长的25分之12.这条公路全长多少
- 10(2009•龙岩模拟)如图所示,质子以一定的初速度v0从边界ab上的A点水平向右射入竖直、狭长的矩形区域abcd(不计质
- 11Mr.Li put a box under his arm.Mr.Li hurried to go to work.用w
- 12书虫中的好词好句
- 13设x1,x2是方程x2-x-2013=0的两实数根,则x31+2014x 2−2013=______.
- 14如何使用UML描述分析系统的用例图、概念类图、顺序图、合作图、活动图和状态图?配上中文的图形
- 15帮我看下这些带引号的句子里,引号的作用分别是什么?