若开环传递函数是二型系统形式,在重极点0处的分离角怎样确定?假设G(s)=K/s^2(s+1)(s+5)
 七村八2022-10-04 11:39:543条回答
七村八2022-10-04 11:39:543条回答
已提交,审核后显示!提交回复
共3条回复
 ztflyfly 共回答了17个问题
ztflyfly 共回答了17个问题 |采纳率88.2%- 把这两个重合的点计算时先看成一个点做,将做出来的结果除以二,然后用180减此角度,这两个角度就是这个重点的分离角
- 1年前
- natingna 共回答了1个问题
|采纳率 - 方法1:运用求出射角的方法,利用相角原则,假设其中一个出射角为a,则2a+0+0-0=180,得a=90,则出射角分别为正负90度。
方法2:分离角a=180/l,其中l为分离点处根轨迹的条数,所给例子中l=2,则a=90,另一个为-90 - 1年前
- 5395241 共回答了1个问题
|采纳率 - 将闭环传函写成零极点的形式,根据相角条件便可以确定每一个极点的分离角。重极点也是一样的道理,只需计算其他极点到零点的角度和便可以了。
- 1年前
相关推荐
- 已知反馈系统的开环传递函数如何求这个系统的单位阶跃响应
已知反馈系统的开环传递函数如何求这个系统的单位阶跃响应
就是这个题目
4
G(S)=-----------
S(S+5)shukan1年前1 -
kafkafak 共回答了16个问题
|采纳率87.5%H(s)=G(s)/(1+G(s)*H(s))
H(s)是反馈的传递函数
单位介跃响应是:H(s)*(K/S)的逆laplace运算1年前查看全部
- 奈氏判据判别系统的稳定性,系统开环传递函数为:G(S)H(S)=5/S(S-1);求解
y12910411年前1
-
3344520wyk 共回答了11个问题
|采纳率100%这么简单还用问?你所提及的传递函数是含有非最小相位环节的,这种题目仍然是可以用奈氏判据解决的.不过有一些点需要注意.
首先绘制概略奈氏图,起点w→0,GH=5/(jw*(-1))故起点为+90°的无穷远点
终点w→∞,GH=5/(jw*jw)为-180°的坐标原点
然后求与负实轴交点,先求对应频率wx,有arctanw-arctanw=180°,没有解
同时注意到系统含有一个积分环节,补画后奈氏图为:从无穷远0°到无穷远+90°向下拐向右到原点180°,没有和负实轴的交点.
因此奈氏曲线不包围(-1,0)点,根据定理Z=P-2N
其中P为开环不稳定极点数,本题中为1
N为包围圈数,本题为0
Z为闭环系统不稳定极点数,本题为1-0=1
故系统含有一个不稳定的闭环极点,系统是不稳定的.
事实上,对非最小相位系统使用奈氏判据,第一点要注意奈氏图的画法,此时常规的90°*v、90°*(n-m)有可能不适用,最好从代数运算的角度分析其起点和终点.
第二点是奈氏曲线与负实轴交点的求解,在求解wx时候,要结合传递函数分析相角
第三点是应用Z=P-2N时,P是开环不稳定极点数,有可能P不再是01年前查看全部
- 已知单位负反馈系统的开环传递函数为G(s)=K(s+1)/s∧3+as∧2+2s+1,利用劳斯稳定求K和a?
已知单位负反馈系统的开环传递函数为G(s)=K(s+1)/s∧3+as∧2+2s+1,利用劳斯稳定求K和a?
系统以2rad/s的频率振荡gyd85532791年前1 -
多少泪的亲爷 共回答了20个问题
|采纳率85%令1+G(s)=0,得到特征方程D(s)=S(τS+1)(2S+1)+k(s+1)=2τS^3+(2+τ)s^2+(k+1)s+k.
routh判据:
s^3 2τ k+1
s^2 2+τ 1
s (2k+kτ+2)/(2+τ)
s^0 k
要求第一列全部大于0,联立不等式解得:k>0,τ>-2o1年前查看全部
- 自动控制原理课程设计一、设一单位负反馈系统的开环传递函数为:G(s)=500/s(s+5)(s+10) 1、画出校正前系
自动控制原理课程设计
一、设一单位负反馈系统的开环传递函数为:G(s)=500/s(s+5)(s+10)
1、画出校正前系统的Bode图,分析系统稳定性,判断系统是否稳定.
2、画出校正前系统的根轨迹图,判断闭环系统是否稳定.
3、设计一个调节器进行串联校正.要求校正后的系统满足如下指标:
(1)在单位斜坡信号作用下,系统的稳态误差cenli5981年前1 -
王航航 共回答了13个问题
|采纳率84.6%“自控原理课程设计”参考设计流程
一、理论分析设计
1、确定原系统数学模型;
当开关S断开时,求原模拟电路的开环传递函数个G(s).
2、绘制原系统对数频率特性,确定原系统性能:c、(c);
3、确定校正装置传递函数Gc(s),并验算设计结果;
设超前校正装置传递函数为:
,rd>1
若校正后系统的截止频率c=m,原系统在c处的对数幅值为L(c),则:
由此得:
由 ,得时间常数T为:
4、在同一坐标系里,绘制校正前、后、校正装置对数频率特性;
二、Matlab仿真设计(串联超前校正仿真设计过程)
注意:下述仿真设计过程仅供参考,本设计与此有所不同.
利用Matlab进行仿真设计(校正),就是借助Matlab相关语句进行上述运算,完成以下任务:①确定校正装置;②绘制校正前、后、校正装置对数频率特性;③确定校正后性能指标.从而达到利用Matlab辅助分析设计的目的.
例:已知单位反馈线性系统开环传递函数为:
要求系统在单位斜坡输入信号作用时,开环截止频率c≥7.5弧度/秒,相位裕量≥450,幅值裕量h≥10dB,利用Matlab进行串联超前校正.
1、绘制原系统对数频率特性,并求原系统幅值穿越频率wc、相位穿越频率wj、相位裕量Pm[即(c)]、幅值裕量Gm
num=[20];
den=[1,1,0];
G=tf(num,den); %求原系统传递函数
bode(G); %绘制原系统对数频率特性
margin(G); %求原系统相位裕度、幅值裕度、截止频率
[Gm,Pm,wj,wc]=margin(G);
grid; %绘制网格线(该条指令可有可无)
原系统伯德图如图1所示,其截止频率、相位裕量、幅值裕量从图中可见.另外,在MATLAB Workspace下,也可得到此值.由于截止频率和相位裕量都小于要求值,故采用串联超前校正较为合适.
图1 校正前系统伯德图
2、求校正装置Gc(s)(即Gc)传递函数
L=20*log10(20/(7.5*sqrt(7.5^2+1))); %求原系统在c=7.5处的对数幅值L
rd=10^(-L/10); %求校正装置参数rd
wc=7.5;
T= sqrt(rd)/wc; %求校正装置参数T
numc=[T,1];
denc=[T/ rd,1];
Gc=tf(numc,denc); %求校正装置传递函数Gc
3、求校正后系统传递函数G(s)(即Ga)
numa=conv(num,numc);
dena=conv(den,denc);
Ga=tf(numa,dena); %求校正后系统传递函数Ga
4、绘制校正后系统对数频率特性,并与原系统及校正装置频率特性进行比较;
求校正后幅值穿越频率wc、相位穿越频率wj、相位裕量Pm、幅值裕量Gm.
bode(Ga); %绘制校正后系统对数频率特性
hold on; %保留曲线,以便在同一坐标系内绘制其他特性
bode(G,':'); %绘制原系统对数频率特性
hold on; %保留曲线,以便在同一坐标系内绘制其他特性
bode(Gc,'-.'); %绘制校正装置对数频率特性
margin(Ga); %求校正后系统相位裕度、幅值裕度、截止频率
[Gm,Pm,wj,wc]=margin(Ga);
grid; %绘制网格线(该条指令可有可无)
校正前、后及校正装置伯德图如图2所示,从图中可见其:截止频率wc=7.5;
相位裕量Pm=58.80;幅值裕量Gm=inf dB(即),校正后各项性能指标均达到要求.
从MATLAB Workspace空间可知校正装置参数:rd=8.0508,T=0.37832,校正装置传递函数为 .
图2 校正前、后、校正装置伯德图
三、Simulink仿真分析(求校正前、后系统单位阶跃响应)
注意:下述仿真过程仅供参考,本设计与此有所不同.
线性控制系统校正过程不仅可以利用Matlab语句编程实现,而且也可以利用Matlab-Simulink工具箱构建仿真模型,分析系统校正前、后单位阶跃响应特性.
1、原系统单位阶跃响应
原系统仿真模型如图3所示.
图3 原系统仿真模型
系统运行后,其输出阶跃响应如图4所示.
图4 原系统阶跃向应曲线
2、校正后系统单位阶跃响应
校正后系统仿真模型如图5所示.
图5 校正后系统仿真模型
系统运行后,其输出阶跃响应如图6所示.
图6 校正后系统阶跃向应曲线
3、校正前、后系统单位阶跃响应比较
仿真模型如图7所示.
图7 校正前、后系统仿真模型
系统运行后,其输出阶跃响应如图8所示.
图8 校正前、后系统阶跃响应曲线
四、确定有源超前校正网络参数R、C值
有源超前校正装置如图9所示.
图9 有源超前校正网络
当放大器的放大倍数很大时,该网络传递函数为:
(1)
其中 , , ,“-”号表示反向输入端.
该网络具有相位超前特性,当Kc=1时,其对数频率特性近似于无源超前校正网络的对数频率特性.
根据前述计算的校正装置传递函数Gc(s),与(1)式比较,即可确定R4、C值,即设计任务书中要求的R、C值.
注意:下述计算仅供参考,本设计与此计算结果不同.
如:由设计任务书得知:R1=100K,R2=R3=50K,显然
令
T=R4C 解得R4=3.5K,C=13.3F
请采纳答案,支持我一下.1年前查看全部
- 单位负反馈系统的开环传递函数为G(s)=K/s(s+3)(s+5),要求系统稳定,确定K的取值范围
单位负反馈系统的开环传递函数为G(s)=K/s(s+3)(s+5),要求系统稳定,确定K的取值范围
如题,在线等
lovejuicezyf1年前1 -
aray0525 共回答了17个问题
|采纳率88.2%见图.可追问. 1年前查看全部
1年前查看全部

- 某单位反馈系统开环传递函数G(s)=1000(s+1)(5s+1)/s²(s²+4s+100),
某单位反馈系统开环传递函数G(s)=1000(s+1)(5s+1)/s²(s²+4s+100),
当输入Xi(t)=(t²/2)*l(t)时,系统稳态误差为
A0 B 无穷 C0.01 D100
控制工程基础试题,选哪一个呢?兰泽追梦1年前1 -
3836soho 共回答了21个问题
|采纳率90.5%首先判断系统为II型系统,输入信号为单位阶跃响应函数和单位加速度函数相乘
对于单位阶跃响应在II型系统下的静态误差系数Kp为无穷大,ess=A/1+K=0
对于单位加速度函数在II型系统下的加速度误差系数Ka=K,ess=A/K=1/10
综上,系统的稳态误差为0*1/10=0
选A1年前查看全部
- 某单位反馈系统的开环传递函数是G(s)H(s)=10(s +4) / s(s+1)(s+2)(s+5) 试确定该系统在单
某单位反馈系统的开环传递函数是G(s)H(s)=10(s +4) / s(s+1)(s+2)(s+5) 试确定该系统在单位阶跃信号作用下skjandyyear1年前1
-
路边小面 共回答了17个问题
|采纳率94.1%从系统的开环传递函数可知系统为I型的,于是Kp=正无穷,Kv=K=4,Ka=0,当输入为单位阶跃信号时,I型系统能对阶跃信号无差跟踪,即其误差Esr=1/Kp=01年前查看全部
- 单位负反馈系统开环传递函数如下:
单位负反馈系统开环传递函数如下:
G(s)=K/0.1s(s^2+2s+2) 求静态位置误差系数。vagwing1年前1 -
otherlife 共回答了20个问题
|采纳率80%静态位置误差系数就是在s趋近于0的G(S)H(S)的值,当系统的输入为单位阶跃信号时,原式的静态位置误差系数就是5k~~1年前查看全部
- 系统的开环传递函数为G(s)=M(s)/N(s),则闭环特征方程为( ) 跪求!
13049881年前1
-
清晨之光 共回答了20个问题
|采纳率95%闭环特征方程为:1+G(s)=01年前查看全部
- 设单位反馈系统开环传递函数为G(S)=k/s(0.01s+1)(0.02s+1),试绘制相应的闭环根轨图
况敏军1年前0
-
共回答了个问题
|采纳率
- 已知单位负馈系统的开环传递函数为G(s)=K*/(S-1)(S方+5s+6),试绘出系统根轨迹
yyc1201年前1
-
fwg110 共回答了17个问题
|采纳率88.2%根轨迹如下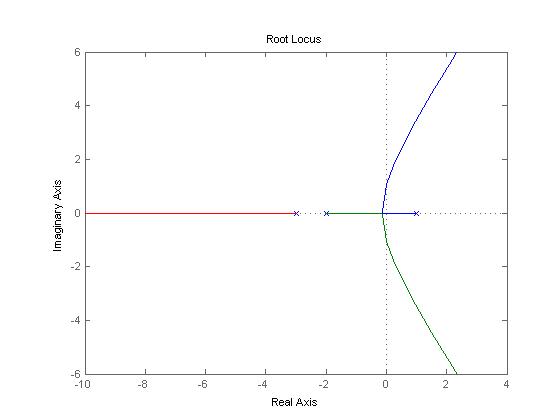 1年前查看全部
1年前查看全部

- 自控考研题,闭环主导极点方面一单位反馈的三阶系统,其开环传递函数为G(s):要求:(1)在单位斜坡作用下的稳态误差为1.
自控考研题,闭环主导极点方面
一单位反馈的三阶系统,其开环传递函数为G(s):
要求:(1)在单位斜坡作用下的稳态误差为1.2
(2) 三阶系统的一对闭环主导极点是S=-1+1j S=-1-1j
求满足上面条件的系统开环传递函数G(s)zzccff1年前1 -
qpiori 共回答了23个问题
|采纳率95.7%该题没有说是否有零点,所以答案有无穷个.由(1)知系统为I型,且增益K=1/1.2由(2)知,设另一闭环极点为-a,(a>0),则系统特征方程为s^3+(2+a)s^2+(2+2a)s+2a=0接下来解题的关键是,把特征方程分成两部分A(s)+B(s)=0,然后方程左右两边同除以A(s)部分,得1+B(s)/A(s)=0.针对本题若无零点,分成【s^3+(2+a)s^2+(2+2a)s】+2a=0,则G(s)=2a/[s^3+(2+a)s^2+(2+2a)s]其中2a=K,即a=5/12.最后结果可看附图若有一个零点,则分成[s^3+(2+a)s^2+(0.8+2a)s]+1.2(s+2a/1.2)=0,即,G(s)=1.2(s+2a/1.2)/[s^3+(2+a)s^2+(0.8+2a)s]其中a>0的任何实数.若有两个零点,也可类似操作. 1年前查看全部
1年前查看全部

- 怎么根据开环传递函数求开环幅频特性和相频特性,帮我做道题
怎么根据开环传递函数求开环幅频特性和相频特性,帮我做道题

上面的是传递函数,大神们解一下,感激不尽
xiaolonghaha2111年前1 -
韩咪 共回答了14个问题
|采纳率85.7%分子上那个字母我打不出,我用a表示.
幅频特性A(w)=[k*根号(a^2+1)]/[w^2*根号(T^2+1)]
相频特性fai(w)=arctana-180-arctanT1年前查看全部
- 为什么开环传递函数的极点在S右半平面系统就不稳定?
yulingxi1年前1
-
火焰碑 共回答了16个问题
|采纳率81.3%错了!
如果对于开环系统的话,这个说法是对的.
如果是负反馈的系统(而且一般系统都是负反馈),应该是系统的闭环传递函数的极点在S右半平面系统不稳定,而不是开环传递函数.
原因是因为,对于负反馈系统的话,假设分母为(s+p1)(s+p2).极点假设为-p1,-p2,-p3.-pn,的话,经过拉式反变换,最后变换出的输出量中有e^(-pt){这个相当于误差},此时只有p满足在S左半平面,(-p)1年前查看全部
- 控制工程:开环传递函数G(s)=1/(3s+1)的单位负反馈的传递函数Q(S)是多少啊
WANGHENGZHI1年前1
-
心只有你1125 共回答了24个问题
|采纳率91.7%Q(S)=G(s)/[1+G(S)]=1/(3s+2)1年前查看全部
- 单位反馈系统的开环传递函数为G(s)=4/s(s+5),试求系统的单位阶跃响应?
单位反馈系统的开环传递函数为G(s)=4/s(s+5),试求系统的单位阶跃响应?
单位反馈系统的开环传递函数为G(s)=4/s(s+5),试求系统的单位阶跃响应?zerolose1年前1 -
westlifekt 共回答了21个问题
|采纳率90.5%闭环传递函数为
4
G(s)=---------------------
s^2+5s+4
4 1 4/3 1/3
输出C(s)=G(s)R(s)=--------------------------= ----- _ ---- + -------
s(s+1)(s+4) s s+1 s+4
所以c(t)=1(t)+4/3*e^(-t)+1/3*e^(-4t)1年前查看全部
- 在计算系统的性能指标时用闭环还是开环传递函数 开环 闭环 误差传递函数分别可以解决什么类型的问题
在计算系统的性能指标时用闭环还是开环传递函数 开环 闭环 误差传递函数分别可以解决什么类型的问题
为什么有些问题(利用劳斯判据判系统稳定)可以用闭环 或开环?侬飞1年前1 -
linmei19850330 共回答了20个问题
|采纳率85%看起来楼主刚开始学自控,我就前几章这些问题讲一下
关键楼主要知道,求一个问题,为什么这样求,这样就会很明朗.
1.性能指标
我们知道,性能指标一般都在阶跃输入下考虑的,比如超调,调节时间等等
我们如何得到这些指标呢?显然需要输出的时域表达式.为了求得这个表达式,有了输入,只要传递函数就行了.
但是对于一个环节的输入输出特性,考虑的是这个环节整体(或者说对外)的特性,因此,假如这个系统是闭环的话,我们考虑外特性,是不管内部结构(比如前向通路是什么,反馈通路是什么)的,而只要一个"整体的"传递函数,这个传递函数只能是闭环传递函数
2.稳定性
我们讲过,一个系统输出运动模态决定于它的极点,输入输出,这个也是外特性,因此,对系统稳定性的判别,其关键在于"系统在s右半平面是否有闭环极点",换句话说,"闭环特征方程的根是否都在s左半平面"
既然是闭环特征方程,如果给的是开环传递函数,也要算出来闭环特征方程再进行判别
我们知道,闭环传递函数fai=G/(1+GH),因此劳斯判据的对象,就是这个1+GH
举个例子:单位负反馈,开环传递函数GH=1/(s^2+2s+3)
那么1+GH=0通分以后就是s^2+2s+3+1=s^2+2s+4=0,劳斯判据针对的是这个式子
3.稳态误差
稳态误差中,有两种方法:
第一种误差系数法,这里面你求limGH、limsGH、lims^2*GH
式子里面已经很清楚了,是开环传递函数GH
第二种是E(s)反拉氏变换,这个你用信号流图梅森公式做就好,书上可能有个式子叫faiE,那个必须是典型结构,不要死记.真正做就用信号流图1年前查看全部
- 已知单位反馈系统的开环传递函数,怎么求闭环传递函数?
jianping_girl1年前1
-
我就是为了得到你 共回答了20个问题
|采纳率95%G(s)=H(s)/(1+/-H(s))
分母里加减是看是单位负反馈还是正反馈,负反馈就取+
H是开环传递函数1年前查看全部
- 已知开环传递函数,如何求闭环特性方程?
已知开环传递函数,如何求闭环特性方程?
还有单位反馈的开环传递函数求闭环传递函数.32547831年前1 -
毛毛虫兄弟 共回答了17个问题
|采纳率100%对于单位反馈的开环传递函数利用公式 G(s)是开环传递函数,Φ(s)就是闭环传递函数,令分母=0就是闭环特性方程
1年前查看全部
G(s)是开环传递函数,Φ(s)就是闭环传递函数,令分母=0就是闭环特性方程
1年前查看全部

- 设单位负反馈系统的开环传递函数为G(s)=K/[s(1+s/3)(1+s/6)]若要求闭环特征方程的根的实部均小于-1,
设单位负反馈系统的开环传递函数为G(s)=K/[s(1+s/3)(1+s/6)]若要求闭环特征方程的根的实部均小于-1,求K
的取值范围.yhamen1年前1 -
vdsvsdvsidvsd 共回答了28个问题
|采纳率92.9%:系统特征方程为
s(1.0.2s)(1 + 0.1s) + K = 0
要使系统特征根实部小于− 1,可以把原虚轴向左平移一个单位,令w = s + 1,即
s = w − 1,代入原特征方程并整理得
0.02w3 + 0.24w2 + 0.46w + K − 0.72 = 0
运用劳斯判据,最后得
0.72 < K < 6.241年前查看全部
- 懂自动控制原理的进给具体的开环传递函数,如果证明一已知的闭环极点是非主导极点并求此时的过渡时间!给具体解题思路.答对才加
懂自动控制原理的进
给具体的开环传递函数,如果证明一已知的闭环极点是非主导极点并求此时的过渡时间!给具体解题思路.答对才加赏!
比如k/s(s2+2s+2)把它做出来firemagicgod1年前1 -
依如从前 共回答了25个问题
|采纳率92%k/s(s2+2s+2)为开环传递函数的话,那么其闭环传递函数的三个根是0;1+j和1-j.由主导极点的定义,那么这个传递函数的主导极点就是0.所以共轭极点可以省去,那么就可以按照一阶系统的时域分析方法计算k/s过渡时间.1年前查看全部
- 设系统的开环传递函数为G(s)H(s)=K/s²(s+1) ,画出根轨迹图,判断系统的稳定性
teatea261年前1
-
amazon-snake 共回答了20个问题
|采纳率90%根轨迹很简单,不画了.稳定性一看就知道,无论K取什么值,系统都不可能稳定.因为系统的特征方程是s^3+s^2+K=0,特征方程缺了s的一次项,凡是出现缺项的,一定都不稳定,这点反映在根轨迹上就是以s=0为起点的两段根轨迹完全在右半平面.1年前查看全部
- 单位反馈系统的开环传递函数为G(s)=Kexp(0.8s)/s+1,试确定系统稳定的K的临界值
单位反馈系统的开环传递函数为G(s)=Kexp(0.8s)/s+1,试确定系统稳定的K的临界值
自动控制原理的,不知道怎么处理指数函数yeaohana1年前1 -
境_迁 共回答了19个问题
|采纳率84.2%你确定指数上是0.8s?不是-0.8s?-0.8s的话代表输出会延迟0.8秒,这很正常也这很好理解.可是0.8s的话就代表输出会提前0.8秒,也就是说还没输入就已经有输出了,这在数学上可以,但在实际中似乎不太可能.你先确定一下,我再算.1年前查看全部
- 单位负反馈系统开环传递函数为G(s)=5/(s*(s+2)) ,求谐振峰值,谐振频率
richo19841年前1
-
xiaojiang2008 共回答了17个问题
|采纳率94.1%此题属于频域法中的谐振问题
如果你手头是古月老师的书,在频域分析法一章是有相关内容的,其他教材也应有相应的介绍.
首先需要根据开环传函求得闭环传函Fai(s)=5/(s^2+2s+5)
对照二阶系统的标准传函形式wn^2/(s^2+2ξwns+wn^2)
则知wn^2=5,2ξwn=2,则自然振荡频率wn=√5,阻尼比ξ=√5/5
对于振荡环节来讲,其谐振现象有如下规律:
1、仅在01年前查看全部
- 能否已知系统的闭环传递函数,求系统的开环传递函数啊?非单位反馈
风雨彩虹61年前1
-
wyx520crx 共回答了27个问题
|采纳率96.3%F=1/(1+G);
G=F/(1-F);1年前查看全部
- 自控原理习题:已知系统的开环传递函数为G(s)H(s)=K/s(0.2s+1),试采用频率法设计串联超前校正装置Gc(s
自控原理习题:已知系统的开环传递函数为G(s)H(s)=K/s(0.2s+1),试采用频率法设计串联超前校正装置Gc(s)
使得系统实现如下的性能指标:1,静态速度误差系数Kv≥100;2,幅值穿越频率ωc′≥30;3,相位裕度γ*≥20°;wsq95591年前1 -
Ap执子之手 共回答了17个问题
|采纳率94.1%不会 我才高三刚毕业 不会1年前查看全部
- 已知单位负反馈系统的开环传递函数为G(s)=K/s(s+2)(s+4)绘制系统的根轨迹并分析系统稳定时K的取值范围;
谗猫猫20071年前0
-
共回答了个问题
|采纳率
- 单位负反馈的开环传递函数为G(s)=4/s(s+5)解:G(s)=4/s(s+5) =4/s(s+1)(s+4)
Small3_33331年前1
-
蝈蝈26 共回答了19个问题
|采纳率73.7%你这个题目让人很尴尬,不知道你要问什么
G(s)=4/s(s+5) =4/s(s+1)(s+4)?这还能有等号?1年前查看全部
- 自动控制原理,求开环传递函数
情系天地间_kk1年前1
-
新红姐 共回答了16个问题
|采纳率100%没显示出相频特性,根据相频判断是两个一阶还是二阶.
写出高k、二阶的频渐近线方程,w=200时对数幅值0求出k.200和400差的少,这是不太准的,题目出的不合适.1年前查看全部
- 单位负反馈随动系统的开环传递函数(可用matlab直接做出来)
单位负反馈随动系统的开环传递函数(可用matlab直接做出来)
一、单位负反馈随动系统的开环传递函数为(ksm1)G(s)=1/s(0.1s+1)(0.001s+1)1、画出未校正系统的Bode图,分析系统是否稳定2、画出未校正系统的根轨迹图,分析闭环系统是否稳定.3、设计系统的校正装置,使系统达到下列指标(1)在单位斜坡信号作用下,系统的稳态误差≤0.001(2)超调量Mp20.4、分别画出校正前,校正后和校正装置的幅频特性图.5、给出校正装置的传递函数.计算校正后系统的剪切频率Wcp和-p穿频率Wcg.6、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析.7、在SIMULINK中建立系统的仿真模型,在前向通道中分别接入饱和非线性环节和回环非线性环节,观察分析非线性环节对系统性能的影响.8、应用所学的知识分析校正器对系统性能的影响(自由发挥).huang1iming1iu1年前1 -
伐木机 共回答了15个问题
|采纳率93.3%楼主可尝试用matlab中控制系统工具箱SISO进行设计1年前查看全部
- 已知单位负反馈控制系统的开环传递函数为G(S)=K(S+1)/S(τS+1)(2S+1),试根据劳思确定系统稳定的τ
已知单位负反馈控制系统的开环传递函数为G(S)=K(S+1)/S(τS+1)(2S+1),试根据劳思确定系统稳定的τ
求K和T的范围tracey09061年前1 -
xf268 共回答了15个问题
|采纳率93.3%令1+G(s)=0,得到特征方程D(s)=S(τS+1)(2S+1)+k(s+1)=2τS^3+(2+τ)s^2+(k+1)s+k.
routh判据:
s^3 2τ k+1
s^2 2+τ 1
s (2k+kτ+2)/(2+τ)
s^0 k
要求第一列全部大于0,联立不等式解得:k>0,τ>-2o1年前查看全部
- 跪求大神指教一道自动控制原理试题:已知单位反馈的开环传递函数为G(S)=(100e-ts)/s(s+1)(s+20)
跪求大神指教一道自动控制原理试题:已知单位反馈的开环传递函数为G(S)=(100e-ts)/s(s+1)(s+20)
有两个问题:1 当t=0时,绘制系统开环对数幅频特性渐进线,求系统的截止频率和相位裕量,病判断系统闭环稳定性.
2 当t不等于0时,确定使闭环系统稳定的t的值.
注意:上面中的t是延迟环节那个字母,打不出来见谅.100后面跟的是个延迟环节,题目就这样,跪求求指教.abian8041年前1 -
寻找一个知心人 共回答了14个问题
|采纳率78.6%答案已发,步骤都有的,好好理解下1年前查看全部
- 单位反馈系统的开环传递函数为G(s)=k/(s(0.1s+1)(0.2s+1)),闭环极点位于s=1垂线的左边,此时k应
单位反馈系统的开环传递函数为G(s)=k/(s(0.1s+1)(0.2s+1)),闭环极点位于s=1垂线的左边,此时k应取何值陈dd背着洋娃娃1年前1
-
清清风起 共回答了18个问题
|采纳率88.9%做一个变换,令s=w+1,用w+1把s替掉,然后对w的特征方程用劳斯判据.道理就是如果w的实部小于0,那么s=w+1的实部就小于1,即在s=1左边
我做出的结果是-1.321年前查看全部
- 设单位负反馈系统的开环传递函数为 GK(S)=1.06/S(s+1)(s+2),怎么求闭环主导极点
天下第在1年前1
-
airfreely 共回答了10个问题
|采纳率80%手算?写出闭环传递函数,并求极点.然后找出主导极点(离y轴近的)1年前查看全部
- 设单位负反馈系统的开环传递函数为G(s)=10(τs+1)/s²(2s+1),若要求系统截止频率ω
设单位负反馈系统的开环传递函数为G(s)=10(τs+1)/s²(2s+1),若要求系统截止频率ω
c=4,试求相应的τ值及相角裕度γ.
本题来自自动控制原理里的《频域分析法》频域稳定性判据等内容,书上不详细,基础又差了点,看不懂,做起来费劲!DD美眉1年前1 -
saddesperado 共回答了18个问题
|采纳率100%准备知识:(1)增加开环极点可以使根轨迹右移(2)增加开环零点可以是根轨迹左移(依稀记得石群老师讲过的一句笑话:零点有一种女人的感觉,呵呵……)(3)开环偶极子的定义:开环系统中相聚很近(与其它零极点相比)的一对零极点,注意这个胡寿松书上的说法不是一样的,胡寿松的书上定义的是闭环偶极子(闭环零极点之间的距离比他们本身的模值小一个数量级),根轨迹校正用到的偶极子是开环偶极子,不能用胡寿松书上的定义,要不就没法做了(4)开环偶极子对根轨迹的影响:①开环偶极子远离原点,基本不改变根轨迹的形状,系统的稳定性和瞬态性能几乎不变②开环偶极子靠近原点,会较大的影响稳态性能,因为它能改变开环增益,我们知道增大开环增益可以减小稳态误差,具体有这样的关系:K’=[|z|/|p|]K K’是之后的开环增益,K是之前的增益,可见只要合理的调整零极点位置就可以增大开环增益,提高稳态性能,从这个表达式就可以看出来为什么不能用胡寿松书上定义闭环偶极子的方法来定义开环偶极子
根轨迹校正的步骤:(1)给定系统瞬态性能确定主导极点的位置(2)绘制未校正的系统根轨迹.若希望的主导极点不在根轨迹上,说明靠调整开环增益不能满足性能指标要求,需要适当校正装置来改造根轨迹,使其通过希望的主导极点(3)校正后的系统根轨迹通过希望的主导极点,还要检验相应的开环增益是否能满足要求.若不满足,可以在原点附近增加开环偶极子来调节开环增益,同时保持根轨迹仍通过希望的主导极点
好吧,我们来看看你这个题:条件(1)G(S)=1.06/S(S+1)(S+2) (2)K’v=5(K’v是校正后的速度误差系数) (3) 维持闭环主导极点不变 ①Kv=limsG(s)=0.5031年前查看全部
- 设单位负反馈系统的开环传递函数为G(s)=10(τs+1)/s²(2s+1),若要求系统截止频率ωc=4,
设单位负反馈系统的开环传递函数为G(s)=10(τs+1)/s²(2s+1),若要求系统截止频率ωc=4,
试求相应的τ值及相角裕度γ.lixiaoyaoo1年前1 -
小小可1 共回答了13个问题
|采纳率84.6%看来是解答不了了!1年前查看全部
- 单位反馈系统的开环传递函数G(s)=100/(0.1s+1)(s+5)试求输入分别为r(t)=2t和r(t)=2+2t+
单位反馈系统的开环传递函数G(s)=100/(0.1s+1)(s+5)试求输入分别为r(t)=2t和r(t)=2+2t+t2时系统稳态误差dyasy1年前2
-
strong_lure 共回答了18个问题
|采纳率88.9%稳态误差计算的两种方法
1)静态误差系数法(s趋于0)
Kp=limG(s) R(t)=V1(t) ess=V/1+Kp
Kv=limsG(s) R(t)=Vt ess=V/Kv
Ka=lims^2G(s) R(t)=V(1/2)t^2 ess=V/Ka
2)终值定理
ess=limsE(s)(s趋于0)
=limsΦe(s)R(s)
注意:无论哪一种做法,你都要先用劳斯判据判断一下稳定性再求解稳态误差
我们就用第一种计算方法:
(1)r(t)=2t
Kv=limsG(s)=0 esss=∞
(2)r(t)=2+2t+t2都不用算了可定时无穷
说明:肯定是你把题目抄错了,出题人不可能这么无聊出这样的题,我估计开环传递函数少了一个积分环节,要是加一个积分环节,那么答案为:(1)20 (2)无穷1年前查看全部
- 已知反馈系统的开环传递函数如何求这个系统的单位阶跃响应
已知反馈系统的开环传递函数如何求这个系统的单位阶跃响应
例如 4
G(S)=-----------
S(S+1)桃瓷1年前1 -
俺叫Chris 共回答了16个问题
|采纳率81.3%根据开环传递函数求出闭环传递函数,例如开环传递函数为G(s),反馈支路为H(s)则闭环传递函数为T(S)=G(S)/(1+G(S)H(S)),然后系统的阶跃相应就是Y(S)=T(S)*(1/S),其中1/S是阶跃信号的拉普拉斯变换1年前查看全部
- 自动控制原理简单问题,写出系统开环传递函数
自动控制原理简单问题,写出系统开环传递函数

只要告诉我怎么求K就可以了,K为什么=2500?
答案是 G(s)=【2500/{[(0.25s+1)^2](0.0025s+1)}】跳钢管的小猪1年前1 -
45605073 共回答了23个问题
|采纳率91.3%L(w)=20lgK-20lg(w^r)1年前查看全部
- 设单位反馈系统的开环传递函数为 G(S)=S+50/S(S+5)(S+10)(S+20)
设单位反馈系统的开环传递函数为 G(S)=S+50/S(S+5)(S+10)(S+20)
1、画出未校正系统的根轨迹图,分析系统是否稳定.
2、对系统进行串联校正,要求校正后的系统满足指标:
(1)在单位斜坡输入下,稳态速度误差40º ,幅值稳定裕度Gm>15.
(3)在阶跃信号作用下,系统超调量Mpdbljc1年前1 -
稀加加 共回答了19个问题
|采纳率94.7%我还没学到这么多.T T1年前查看全部
- 某单位反馈系统开环传递函数为16/s(s+4),
某单位反馈系统开环传递函数为16/s(s+4),
(1)试计算系统单位阶跃的超调量、上升时间和调节时间
(2)若r(t)=30+2t,求系统的稳态误差wflman1年前1 -
一统江山一 共回答了13个问题
|采纳率92.3%讲到单位负反馈,知道G(s)=1/s(s+1).那么Y(s)/X(s)=G(s)/(1+G(s))=1/(S^2+S+1)
二阶系统的G(s)有个通式:
ωn^2
G(s) = --------------------------------
S^2 + 2*ζ*ωn + ωn^2
对应上面的式子就很容易求出ωn和ζ,ωn=1,ζ=0.5
峰值时间 tp=π/ωd=π/(ωn*sqrt(1-ζ^2))
上升时间 tr=(π-θ)/ωd =(π-θ)/(ωn*sqrt(1-ζ^2)) =2.418
θ=arctan(sqrt(1-ζ^2)/ζ)=1.047
超调量 σp=exp(-ζ*π/sqrt(1-ζ^2))*100%=16.3%
调整时间 ts 分两种不同的误差范围(Δ) ±2%~±5%
ts= -lnΔ /(ζ*ωn)1年前查看全部
- 开环传递函数中串联有一个积分环节时(开环是稳定的),闭环系统一定稳定吗?为什么?
尤利西斯1年前1
-
tefa943 共回答了15个问题
|采纳率80%不一定稳定.
随便一个I型三阶,无零点的开环传递函数,画根轨迹都会穿到虚轴右边.即K*足够大时,系统不稳定.1年前查看全部
- 已知开环传递函数G(S)H(S)=10/S平方(1+0.1s)(1+10s),用极坐标判断该系统的稳定性
飞扬火车1年前0
-
共回答了个问题
|采纳率
- 某单位负反馈的开环传递函数为G(S)=2/s*s(s+2),则此系统在单位阶跃函数输入下的稳态误差为( )
andylau181年前0
-
共回答了个问题
|采纳率
- 《自动控制原理》求助《自动控制原理》中的一道习题:设单位负反馈系统的开环传递函数为G(s)=K/[s(s+3)(s+7)
《自动控制原理》求助
《自动控制原理》中的一道习题:
设单位负反馈系统的开环传递函数为
G(s)=K/[s(s+3)(s+7)]
试确定使系统具有欠阻尼阶跃响应特性的K的取值范围沙澧居士1年前1 -
jyqtzx 共回答了19个问题
|采纳率84.2%给你个思路:
首先画出根轨迹的草图,你会发现,从-7向左的那条根轨迹始终在负实轴上,且随参数K的增大离虚轴越远;同时注意,另外两条根轨迹,从0向左,-3向右,这两条根轨迹会在实轴上汇合而后分离,且分离后进入复平面,而后一条沿60度渐近线穿过虚轴进入右半平面,另一条沿-60度渐近线穿过虚轴进入右半平面.
知道根轨迹草图了,那么系统具有欠阻尼阶跃响应特性的K的取值范围可以确定了,就是两条根轨迹离开实轴上的分离点,直到和虚轴相交前,即:K(分离点)1年前查看全部
- 已知一单位反馈控制系统开环传递函数G(s)=10/(s+1).有一输入信号作用到闭环函数上.
已知一单位反馈控制系统开环传递函数G(s)=10/(s+1).有一输入信号作用到闭环函数上.
输入信号是r(t)=sin(t+30'),求闭环系统的稳态输出,也许我爱你1年前1 -
lin若语 共回答了17个问题
|采纳率100%先求闭环系统函数,再求输入的拉斯变换,输出等于输入乘系统函数,再求输出的拉斯反变换1年前查看全部
- 自动控制原理一道计算题求解一单位反馈系统的开环传递函数为G(小k)=1/s(s+1),求系统的单位阶跃响应及动态性能指标
自动控制原理一道计算题求解
一单位反馈系统的开环传递函数为G(小k)=1/s(s+1),求系统的单位阶跃响应及动态性能指标α%,t(小r),t(小s)和t(小p).】幽_幻1年前1 -
lenovo1012 共回答了19个问题
|采纳率84.2%Y(S)=1/s/(s^2+s+1),做反拉氏变换得到y(t)=1-exp(-0.5t)*cos(sqrt(3)t),各项指标你根据定义应该就能求到.因为像爬升时间什么的,各地方定义的可能都不一样,所以我也不一定能算出正确的结果,你根据你课本中的定义,应该就能算出正确的结果.1年前查看全部
- 系统的开环传递函数为G(s)=A(s)/((1+X(s)Y(s))则1+X(s)Y(s)的根为系统特征方程的根,是否正确
系统的开环传递函数为G(s)=A(s)/((1+X(s)Y(s))则1+X(s)Y(s)的根为系统特征方程的根,是否正确?急用?
自动控制系统有序世界1年前1 -
issara 共回答了17个问题
|采纳率82.4%感觉是不对的,无论什么时候,都应该先求出闭环传递函数,得到分母为特征方程,再来解特征根
你没有给是否为单位负反馈,就先默认了,设1+XY=B
则G=A/B,fai=G/(1+G)
因此1+G=0就是闭环特征方程,即1+A/B=1+A/(1+XY)=0即1+XY+A=0
显然不是恒成立的1年前查看全部
- 给个正确解答 设单位负反馈系统的开环传递函数为G(s)=K/[s(1+s/3)(1+s/6)]若要求闭环特征方程的根的实
给个正确解答 设单位负反馈系统的开环传递函数为G(s)=K/[s(1+s/3)(1+s/6)]若要求闭环特征方程的根的实部均小于-1,求K
的取值范围.duwu_19821年前1 -
wang1329 共回答了16个问题
|采纳率87.5%根轨迹法,用角度关系可以求得当实部位-1时,虚部需为正负根号3
再根据根的位置求K,我算的K为28
所以K<281年前查看全部
大家在问
- 1该图显示了一个直径为154 mm 的圆.如果非阴影区域被切出,求出阴影区域周长,单位为 mm.
- 2(1)已知:C(s)+O2(g)═CO2(g)△H=-393.5kJ/mol
- 3I was walking on the street和I walked on the street 的区别
- 4确认一下韩饭说的世巡,日专,放送是什么意思
- 5Do youoften hear( )you pen pals用介词副词填空
- 6下列各种自然现象形成的过程中,要吸收热量的是( ) A.夏天,冰棍“冒出”的“白气” B.冬天,天上纷纷飘落的雪花 C
- 710点了,该睡觉了.用上time bed.王老师太忙了,她没有时间看电视.用上 so that wactch.
- 81千卡等于多少卡?大卡又是什么?3者什么关系?
- 9为什么说两轮船,速度一样一个逆水前进,一个顺水 如果以岸边为参照物则顺水速度快 然而以水为参照物
- 10有关位置的英语单词(越多越好)
- 11-五x等于25乘以四减去十五x
- 12he arrived half an hour late, ___ made us unhappy
- 13C7H7Cl的含有苯环的同分异构体共有几种?
- 14在看电影或看电视时,如果画面上同时有一远一近两人,当近处人像清晰是,远处人像是模糊的.而当远处人像清晰时,近处是模糊的.
- 15harry potter 英文简介