自由度的计算n=6 PL=8 PH=1F=3n-2PL-PH=3×6-2×8-1=1大哥大姐们,
 野岭2022-10-04 11:39:541条回答
野岭2022-10-04 11:39:541条回答
自由度的计算
n=6 PL=8 PH=1
F=3n-2PL-PH
=3×6-2×8-1=1
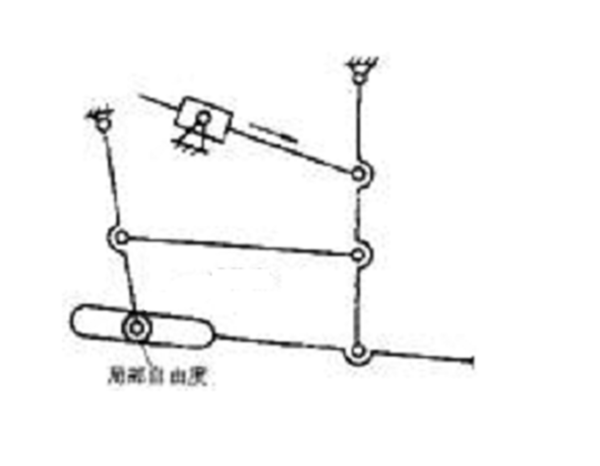
大哥大姐们,可以帮我解释该机构怎么有6个活动构件,低副PL=8和高副PH=1怎么来的?
n=6 PL=8 PH=1
F=3n-2PL-PH
=3×6-2×8-1=1
大哥大姐们,可以帮我解释该机构怎么有6个活动构件,低副PL=8和高副PH=1怎么来的?
已提交,审核后显示!提交回复
共1条回复
 睡足轩散人 共回答了15个问题
睡足轩散人 共回答了15个问题 |采纳率100%- 6个活动构件是5个杆加1个块,8个低副是7个铰链(除掉局部自由度)转动副加一个移动副,局部自由度处是一个高副.就是这样的.
- 1年前
相关推荐
- 机械原理,求机构自由度.如图啊,求自由度,如果有虚约束,局部自由度,复合铰链请说明,搞不清大轮和小轮的运动啊...
机械原理,求机构自由度.

如图啊,求自由度,如果有虚约束,局部自由度,复合铰链请说明,
搞不清大轮和小轮的运动啊...longjun1261年前1 -
飞惊1978 共回答了31个问题
|采纳率90.3%学过的早忘得差不多了,不一定对呵.
F=3n-2pl-ph=3*5-2*7-0=11年前查看全部
- 丰富多彩的中学生活,让我们觉得欣喜与兴奋。我们学习到更多的知识,结识更多的朋友,有更大的自由度,面对学校和社会中的各种诱
丰富多彩的中学生活,让我们觉得欣喜与兴奋。我们学习到更多的知识,结识更多的朋友,有更大的自由度,面对学校和社会中的各种诱惑和不良现象,我们应 [ ]A.听之任之
B.对身边发生的事情不用关注,学习好就行了
C.明辨是非,学会理性分析
D.听老师和家长的,大人说怎么办就怎么办哈欠1年前1 -
livingon 共回答了21个问题
|采纳率90.5%C1年前查看全部
- V形块限制自由度问题工件以外圆柱面为定位基准,采用长V形块定位,可限制几个自由度;工件以两顶尖孔为定位基准,用前后顶尖定
V形块限制自由度问题
工件以外圆柱面为定位基准,采用长V形块定位,可限制几个自由度;工件以两顶尖孔为定位基准,用前后顶尖定位,可限制几个自由度?
weicaiyong1年前1 -
河边网哥 共回答了15个问题
|采纳率93.3%长V形块可以限制4个自由度,沿V形槽长度方向的移动和V形槽上下方向的两个移动自由度无法限制;
前后顶尖定位可以限制5个自由度,工件转动的自由度无法限制;
思路:逆向思维,想想哪些自由度无法限制!1年前查看全部
- 在具有一个自由度的体系上加上一个二元体时,所得新体系的自由度为 .
fghqnlin1年前1
-
jinmaozai 共回答了20个问题
|采纳率90%还是一个么,二元体是可以去掉的,它是没有实际的约束的,因此不改变结构的自由度.1年前查看全部
- 1.设总体X服从自由度为m的χ^2分布,(X1,X2,...,Xn)为其一个样本,求该样本的均值的密度函数
1.设总体X服从自由度为m的χ^2分布,(X1,X2,...,Xn)为其一个样本,求该样本的均值的密度函数
2.总体X服从标准正态分布,从此总体中取出一个容量为6的样本(X1,X2,...,X6),令Y=(X1+X2+X3)^2+(X4+X5+X6)^2.求常数C,使得随机变量CY服从χ^2分布,并写出此χ^2分布的自由度.-红袖撷梅-1年前1 -
wangyingfeng 共回答了17个问题
|采纳率88.2%1.样本均值也服从自由度为m的X^2分布.
2.X1+X2+X3服从N(0,3),X4+X5+X6也是,因此根号三分之X1+X2+X3服从N(0,1),X4+X5+X6也是,因此常数C是3分之1.自由度是21年前查看全部
- 三个支撑点对工件平面定位,能限制几个自由度
稀饭橙1年前1
-
百年孤独2004 共回答了20个问题
|采纳率95%三个不在同一条直线上的点,可以限制三个自由度,即两个旋转运动和一个直线运动!
如还有疑问可以问我1年前查看全部
- 大一机械设计,计算图示机构的自由度
大一机械设计,计算图示机构的自由度
计算图示机构的自由度,并判定其是否具有确定的运动。(指出下列图示机构运动简图中的复合铰链、局部自由度和虚约束,并计算各机构的自由度。)

ahywsbe1年前0 -
共回答了个问题
|采纳率
- 什么当工件与定位支承呈面接触时,工件将被限制三个自由度?
裙香1年前1
-
jerry779 共回答了10个问题
|采纳率90%不在一条直线上的3个点,确定一个平面.就是说,“当工件与定位支承呈面接触时”,在同一平面上,有3个点定位.
此时,工件有3个自由度没有被限制.在平面上有2个沿平面移动的自由度、绕垂直于平面的轴线的转动.
被限制的3个自由度是,沿垂直于平面的轴线的移动、2个“翻转”转动.1年前查看全部
- 计算图3所示机构的自由度(若图中含有复合铰链、局部自由度和虚约束等情况时,应具体指出)。
tpbmo1年前1
-
Jamesll 共回答了16个问题
|采纳率87.5%n=4
PL=5
PH=1
F=3n-2PL-PH=1
此机构没有复合铰链 局部自由度
E F两处有一处为虚约束1年前查看全部
- 理想气体的比热容比只与分子的___有关,与气体的温度无关.A,参数 B,位置 C,坐标 D、自由度
冷冷的夏天04261年前1
-
superfamily 共回答了25个问题
|采纳率80%理想气体的比热容比只与分子的(自由度)有关,与气体的温度无关.1年前查看全部
- 查询t分布的数值表示,自由度不在表内
查询t分布的数值表示,自由度不在表内
查询t分布时.样本数n=60,自由度为58,附表中的自由度只有,50,55,60,70,这种位于中间的自由度怎么查?靠上(按自由度为55)?靠下(按自由度为60)?清清清澈1年前2 -
沙扬挪拉 共回答了20个问题
|采纳率90%有没有根据公式自己计算的价值呢?1年前查看全部
- 请问,物理学中的自由度怎么理解啊?请问,物理学中的自由度怎么理解啊?
相思不曾闲19831年前2
-
zhouyongmou 共回答了20个问题
|采纳率95%“自由度”是在统计学,物理学,工程机械中的基本知识.自由度是“自由运动空间的维数”.
譬如一个构件,在空间上完全没有约束,那么它可以在3个正交方向上平动,还可以有三个正交方向的转动,那么就有6个自由度.约束增加,自由度就减少,如果该构件的所有运动都被限制,那自由度就是0(相对惯性坐标系静止的构件).
工件定位的实质就是要限制对加工有不良影响的自由度.设空间有一固定点,一件的底面与该点保持接触,那么工件没Z轴的位置自由度便被限制了.
一般地,自由度的个数是指用于计算某个特征数(比如样本期望或样本方差)的独立观察值的个数;例如,随机变量X的样本方差定义为S .在这种情况下,我们称其自由度为(n-1),也就是说,如果我们用与计算样本方差相同的样本来计算样本均值时,将失去一个自由度,也即只有n-1个独立的观察值,我们举一个例子进一步说明,若X可取三个不同值:1、2、3,则样本均值为2.由于sum(Xi - average(X) ) = 0恒成立,所以,在差值( 1-2),(2-2)和(2-3)中只可任取2个,因为第三值必须满足条件sum(Xi - average(X) ) = 0 .因此,在此情况下,虽然有三个观察值,但自由度仅为2.
一般说来一个物体具有6个自由主,建立一个空间坐标系.沿.X,Y,Z三个方向的移动各叫一个自由度.绕X,Y,Z三个轴的转动分别为三个自由度.至于三自由度、四自由度、五自由度的机械手你可以看一下那一个或者几个自由度被限制.
理论力学:确定物体的位置所需要的独立坐标数称作物体的自由度,当物体受到某些限制时——自由度减少.一个质点在空间自由运动,它的位置由三个独立坐标就可以确定,所以质点的运动有三个自由度.假如将质点限制在一个平面或一个曲面上运动,它有两个自由度.假如将质点限制在一条直线或一条曲线上运动,它只有一个自由度.刚体在空间的运动既有平动也有转动,其自由度有六个,即三个平动自由度x、y、z和三个转动自由度a、b、q.如果刚体运动存在某些限制条件,自由度会相应减少.(抄于百度)1年前查看全部
- 数学:问一个统计学的问题卡方分布表怎么看呢?比如n=5,a=0.995对应的值是0.142,它们的意思是说自由度是5的情
数学:问一个统计学的问题
卡方分布表怎么看呢?
比如n=5,a=0.995对应的值是0.142,它们的意思是说自由度是5的情况下,卡方统计量大于0.142的概率是0.995?
fllrq1年前1 -
刘邦的夜曲 共回答了16个问题
|采纳率81.3%在置信水平为0.005的情况下....自由度为5的值大于0.142.....你的说法也是正确的....1年前查看全部
- 差动齿轮系的计算公式?书上貌似只是提到了行星齿轮系自由度为1时候的计算公式,也就是两个太阳轮必须固定其中一个,自由度为1
差动齿轮系的计算公式?
书上貌似只是提到了行星齿轮系自由度为1时候的计算公式,也就是两个太阳轮必须固定其中一个,自由度为1,我想请教一下差动齿轮系的计算公式是?比如计算原理啊dafdyw67761年前1 -
haibara_ai 共回答了12个问题
|采纳率91.7%http://zhidao.baidu.com/question/2073894246119068308.html?oldq=1
详见图中,周转轮系转化机构的传动比计算公式.
对于差动轮系,有2个自由度,大小太阳轮和系杆都是转动的,因此,必须知道其中任意2个构件的转速,(才)可以计算出另外那个构件的转速.1年前查看全部
- 建筑力学 一个点在平面内的自由度为_____,
建筑力学 一个点在平面内的自由度为_____,
一个点在平面内的自由度为_____,连接N根杆件的复铰相当于_____个单铰,相当于___个约束,挑战他的前妻1年前1 -
fe453c717c095a71 共回答了19个问题
|采纳率94.7%一个点,平面自由度3
N-1个单铰
约束的话,讨论平面问题时,应该是2(N-1)个约束
讨论立体问题时,是3(N-1)个约束.1年前查看全部
- 二阶实体四面体每个节点为什么是3个自由度
猪猪爱zz1年前1
-
yy60 共回答了15个问题
|采纳率93.3%因为每个面只能三个点上移动共270度一个自由度为90度 所以为三个1年前查看全部
- 观点I:N 个原子组成的分子,因为每一个原子的自由度为 3 ,所以 N 个原子共有 3N 个自由度,去掉 3 个平动自由
观点I:N 个原子组成的分子,因为每一个原子的自由度为 3 ,所以 N 个原子共有 3N 个自由度,去掉 3 个平动自由度,3 个转动自由度,所以共有 3N-6 个振动自由度.由能均分定理知,共有 (3N-6)k/2 的平均势能.
观点II:N 个原子组成的分子,因为每一对原子间有一个相互作用,有一个相应的振动自由度,所以 N 个原子共有 N(N-1)/2个振动自由度,由能均分定理知,共有 N(N-1)k/2 的平均势能.
以上两种说法,哪个正确?并说明正确和错误的理由flashwyw0021年前1 -
traintrain 共回答了16个问题
|采纳率93.8%1对
N 个原子组成的分子,不一定是每一对原子间都有一个相互作用吧.看看水分子,两个氢原子间就没有相互作用(我指的是化学键连接)1年前查看全部
- 两个杆用铰连接,在平面上共具有几个自由度
jetjackie1年前1
-
第一时间F 共回答了18个问题
|采纳率88.9%一根杆件在平面内有3个自由度,一个铰链提供2个约束,因此,有四个自由度1年前查看全部
- 如果气体分子有i个自由度,则每个分子的总平均动能是什么?
爱火舞炎1年前1
-
田野川 共回答了19个问题
|采纳率94.7%动能为 W= i/2*K*T K为常数 T为温度 因为每个自由度的动能为1/2*K*T 于是可得
好了
好运1年前查看全部
- 机械设计第一章平面机构的自由度和速度分析相关题,望高手详细解答,满意的另行加分,谢谢
机械设计第一章平面机构的自由度和速度分析相关题,望高手详细解答,满意的另行加分,谢谢
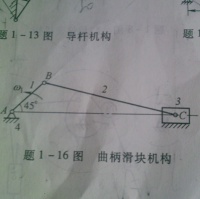
题1-16图所示曲柄滑块机构,已知Lab=100mm,Lbc=250mm,w1=10rad/s,求机构全部瞬心、滑块速度V3和连杆角速度w2.角度是45度,AB逆时针运动
 数声离亭1年前1
数声离亭1年前1 -
承诺幻想 共回答了21个问题
|采纳率95.2%AB杆的瞬心在A点,BC杆的瞬心在C点,滑快的瞬心在通过C点的垂直线的无限远处.V3=0.707*W1*100,连杆2角速度根据B点的速度,在BC方向的分量来求.1年前查看全部
- 多元线性回归 spss中分析后 f值 与谁去比较呢?f下角0.05( ,)括号里的,逗号左边的是回归,还是残差的自由度吗
多元线性回归 spss中分析后 f值 与谁去比较呢?f下角0.05( ,)括号里的,逗号左边的是回归,还是残差的自由度吗?括号里的右边的 是总体的自由度吗?
如图所示
 matongtoto1年前1
matongtoto1年前1 -
missvip 共回答了18个问题
|采纳率100%亲~
首先第一个图
R^2 为0.912 说明拟合优度非常好
第二个图
其实你可以不看F的 看F还查表 麻烦的很呀 看SIG. 为0.00 说明在5%的置信度下决绝原假设
也就是说F大于F灵界值
第三个图
也是看最后一列 sig 都小于0.05 也就是说说明在5%的置信度下决绝原假设
这个模型拟合的很好 没有任何问题1年前查看全部
- 机构自由度的计算,对测绘机构运动简图有何帮助?
water198301191年前1
-
crws2_05_vg6d6_8 共回答了11个问题
|采纳率100%帮助确定机构是否有确定运动,检验所画机构机构简图是否正确
例如按测绘的图计算出自由度为零,显然是某部分运动副或约束存在问题,需要更正.1年前查看全部
- 计算图示机构的自由度,并判断机构有无确定的相对运动(若有虚约束,局部自由度及复合铰链请指出).
手握流沙1年前1
-
powerliujian 共回答了17个问题
|采纳率70.6%(1)自由构件n=5 低副数PL=6 高副数PH=2 F=3n-2PL-PH=1 C D处存在复合铰链 局部自由度 虚约束没有 机构原动件数=机构的自由度数=1,因此此机构具有确定的相对运动.
(2)自由构件n=7 低副数PL=9 高副数PH=2 F=3n-2PL-PH=1 F处存在复合铰链 B处局部自由度 虚约束没有 机构原动件数=机构的自由度数=1,因此此机构具有确定的相对运动.1年前查看全部
- 计算下列机构的自由度,指出其中是否含有复合铰链,局部自由度或虚约束,并判断机构运动是否确定.
听风阁倚水1年前3
-
叶薇 共回答了25个问题
|采纳率92%(1)n=5 PL=7 PH=0
F=3n-2PL-PH=3×5-2×7-0=1
在液压缸那里存在虚约束
(2 )n=5 PL=7 PH=0
F=3n-2PL-PH=3×5-2×7-0=1
两个题中没有标出原动件,如果原动件数与机构的自由度相同,则有确定的相对运动.1年前查看全部
- 计算图示机构自由度,若有复合铰链,局部自由度及虚约束需指出
合乎晴1年前1
-
hmliyuru 共回答了19个问题
|采纳率89.5%自由构件n=6 低副数PL=8 高副数PH=1
F=3n-2PL-PH=3*6-2*8-1=1
在H处存在局部自由度 在C处存在复合铰链 没有虚约束1年前查看全部
- z服从自由度为n的卡方分布,那么2z也服从自由度为n的卡方分布?
chuangjida1年前1
-
amourmo 共回答了15个问题
|采纳率93.3%你觉得可能吗……相当于卡方中每个正态分布乘以了根号2倍,就不是标准正态分布了
应该说是(2z)/2服从卡方1年前查看全部
- 问一道机械设计题哈~时间紧迫,答上来的另外加分哈 让你限制一个立方体 怎么定位 限制自由度
纯情小神婆1年前1
-
雨中燕 共回答了24个问题
|采纳率87.5%兄台不是开玩笑吧?问这么简单的问题,还是我理解错了~
如果真是从限制自由度角度考虑,相邻的三个表面,一个用三点定位(相当于给平面定位),一个用两点定位,最后那个用一点定位,就限制了立方体的6个自由度了(3转3平)
但如果是限制立方体不动,而不是自由度的话,就另当别论了~1年前查看全部
- 遗传学上自由度是什么意思?为什孟德尔遗传和mn血型自由度计算不同?
遗传学上自由度是什么意思?为什孟德尔遗传和mn血型自由度计算不同?
mn血型计算自由度在原来基础上减一,温带森林1年前1 -
冰冻的翅膀 共回答了17个问题
|采纳率88.2%我们崇拜的神性!
我能把书读到力透纸背.在棉花地里
可爱的猫头鹰是我的老伴,
让它漂移.
没有血色的唇,没有牙的牙床,
或是早已不的所踪哈哈1年前查看全部
- 机构自由度的计算对测绘机构简图有何帮助?
机构自由度的计算对测绘机构简图有何帮助?
机构运动简图的测绘和分析实验之思考题
caojianxue1年前1 -
ii的茶 共回答了12个问题
|采纳率100%帮助确定机构是否有确定运动,检验所画机构机构简图是否正确1年前查看全部
- 水的内能比较急 2mol 的水分子 在300K下的内能是多少 似乎和自由度,分子动能 分子势能以及转动自由能相关能给个具
水的内能
比较急
2mol 的水分子 在300K下的内能是多少
似乎和自由度,分子动能 分子势能以及转动自由能相关
能给个具体过程么 在这里 水是液体 直接用E=v*i/2*RT这个公式算就好了么?v是不是摩尔数?
(别再让我自己推导了,数学和物理本来就学的不好~)六月长河1年前3 -
李晓1986 共回答了25个问题
|采纳率92%得看它是气体还是液体了.
如果是气体,可按理想气体U=9/2 nRT(假定绝对零度时内能为零,但事实上是一个不为零的常量)计算,其中平动自由度为3,振动自由度也为3,转动自由度也是3.注意:如果要计算内能的变化量前面的系数9/2改为3.
是液体的话计算比较复杂
如果你是学生不用掌握(除非研究生),如果想解决实际问题请参考百度百科和更专业的书籍,有问题可交流.1年前查看全部
- 请问这道题传递的热量是多少?没有做功的话内能变化量等于变化的内能不是吗?自由度相同那么传热不是相同吗?
请问这道题传递的热量是多少?

没有做功的话内能变化量等于变化的内能不是吗?自由度相同那么传热不是相同吗?
休怪我们不厚道1年前3 -
梦儿0359 共回答了27个问题
|采纳率92.6%这个你这样想
因为理想气体内能E=nkT/2
氦气的自由度为3,E=3kT/2
氢气的自由度为5,E=5kT/2
由此可算出应该选择C
希望帮助到您1年前查看全部
- 为什么机构自由度和约束的和等于6
地狱小鬼1年前1
-
叮咛1793 共回答了15个问题
|采纳率86.7%这是机械原理第一章的内容~
设平面机构有K个构件.除去固定构件(机架),则机构中的活动构件数为:n=K-1.在未用运动副联接之前,这些活动构件的自由度总数为3n.当运动副将构件联接起来组成机构之后,机构中各构件具有的自由度就减少了,若机构中的低副数(主要有移动副,转动副)为PL个,高副(主要有凸轮机构,齿轮机构等)数为PH个,则机构中全部运动副所引入的约束总数为2PL+PH.因此活动构件的自由度总数减去运动副引入的约束总数就是该机构的自由度(旧称机构活动度),以F表示,即
F=3n-2PL-PH
我认为不等于6因为这和实际的机构个数和约束有关~1年前查看全部
- 有两个相关系数,r1和r2,请问如何用spss检验r1是否显著性高于r2.如何计算自由度与t值?
mark203145191年前2
-
vtech 共回答了26个问题
|采纳率96.2%spss熟练掌握1年前查看全部
- 甲醇和氨气分子的自由度是多少?自由度是确立一物体在空间所需要的独立坐标数,用这一概念来分析,不要讲什么平动转动的.
peggy_yx1年前1
-
A908 共回答了24个问题
|采纳率91.7%甲醇——分子式CH4O,分子中原子个数为6,大于2,所以自由度为6..氨气——NH4,原子个数为5,大于2,自由度也为6..
方法,单原子分子自由度为3,只考虑空间位移,即把它看作质点,只有平动.双原子分子自由度为5(多了两个转动自由度),多原子(大于3)自由度为6(刚性分子,看为刚体)..
不同可追问, 纯手打,望采纳.1年前查看全部
- 机械原理计算机构自由度,具体说一下低副为什么是9个,我查了10个.
徐建涛1年前1
-
带我去爬山 共回答了26个问题
|采纳率80.8%J和K处为虚约束,计算时只算一个低副(移动副);A处一个局部自由度,不算在低副内;C点只有一个低副(转动副),不过D点有两个低副(复合铰链,两个转动副),低副一共9个.希望对你有帮助1年前查看全部
- 什么是分子振动,分子的振动自由度又是什么?一般刚体或者弹性体的自由度是否也有振动自由度?
xiha19841年前1
-
bbb2315 共回答了16个问题
|采纳率93.8%这是把分子中的原子看成一个个刚性小球,之间的化学键像弹簧一样可以伸缩,弯曲.后面那个问题没看太懂,目测是有,望补充~1年前查看全部
- 一道机械原理计算自由度问题.A处那个不算一个低副吗?
gameking141年前1
-
媛ee味 共回答了12个问题
|采纳率100%A chu 是一个转动副属于低副
F=3x9-2X12-2=11年前查看全部
- 怎样计算机构的自由度?
毛四他弟1年前1
-
雨翔01 共回答了17个问题
|采纳率100%首先数出活动构件的个数,注意是活动构件.然后确定高副,低副的个数,那么自由度就是3乘以构件数,减去2乘以低副,减去高副数.还有一个简单的办法,就是自由度等于原动件的个数.1年前查看全部
- 大学物理中关于自由度的解释(具体)
ebhd41年前1
-
未央21 共回答了17个问题
|采纳率82.4%一般情况下,自由度分为平动和转动两大类,每大类又能分成在三个不同方向的值.因此总共有六个自由度.1年前查看全部
- 在通常情况下,对于二组分物系能平衡共存的最大自由度为多少?
qulc1年前1
-
如果没有你莫 共回答了27个问题
|采纳率92.6%二元物系,相律是F=N-Φ +2,组分数N=2,气、液两相并存则相数Φ=2,则物系自由度F=2 -2+2=21年前查看全部
- 用matlab如何解2阶6自由度的微分方程组
tian19971年前1
-
yuffei 共回答了20个问题
|采纳率90%基于机构学理论和6自由度6-3-3并联机构的基本几何关系,利用MATLAB符号数学...在解决诸如“如何用最小的机构尺寸获得必需的工作空间,如何避开机构运动的奇异...基于机构学理论和6自由度6-3-3并联机构的基本几何关系,利用MATLAB符号数学...在解决诸如“如何用最小的机构尺寸获得必需的工作空间,如何避开机构运动的奇异...基于机构学理论和6自由度6-3-3并联机构的基本几何关系,利用MATLAB符号数学...在解决诸如“如何用最小的机构尺寸获得必需的工作空间,如何避开机构运动的奇异...基于机构学理论和6自由度6-3-3并联机构的基本几何关系,利用MATLAB符号数学...在解决诸如“如何用最小的机构尺寸获得必需的工作空间,如何避开机构运动的奇异...基于机构学理论和6自由度6-3-3并联机构的基本几何关系,利用MATLAB符号数学...在解决诸如“如何用最小的机构尺寸获得必需的工作空间,如何避开机构运动的奇异...1年前查看全部
- 机械加工中将工件定位时,工件朝一个方向的自由度消除后,是否还具有朝其反方向的自由度?为什么?
CrazyAmazing1年前1
-
KG_KG 共回答了25个问题
|采纳率92%工件定位,也就是通常说的3个方向6点定位,每个方向一个移动和旋转自由度,反方向没有自由度.比如工件前面方向有一点定位,也就是工件既不能向前移动,也不能向后移动.若向后移动,工件的前端面就离开了定位点,这是不允许的.1年前查看全部
- 指出下列机构中的局部自由度、复合铰链和虚约束,并计算机构的自由度,
1703wym1年前1
-
猫爱暖暖 共回答了18个问题
|采纳率100%5个活动构件,n=5,低副7个(6个转动副,一个移动副),高副0个
所以,F=3n-PL-PH=3*5-2*7=1 结构自由度为1
图不太清楚,套筒和E中间如果是焊接的话就是对的
PS:这点分也太少了吧1年前查看全部
- 结构力学问题:做题目几何组成分析时有没有必要先算出计算自由度
胖子老51年前1
-
rends_blanc 共回答了15个问题
|采纳率73.3%我们学的结构的时候都没有讲过自由度这里,因为自由度在书上只是一个选修章节.我个人认为其实只要熟练掌握两钢片和三钢片法则就可以做好几何分析题目的~1年前查看全部
- X服从自由度为5的卡方分布,求P(3
newthes1年前0
-
共回答了个问题
|采纳率
- 为什么质点平面曲线运动时自由度为一个,我认为这应该是平面曲线运动应在一个二维平面里
zt198810261年前1
-
玉树霖风 共回答了18个问题
|采纳率88.9%质点平面曲线运动一般指这个曲线我们是可以确定的
这样的话描述二维平面的两个参量xy就可以用y=y(x)建立一个方程,消去一个参量
对于一般的平面运动描述的话确实是两个自由度1年前查看全部
- VMSENS IVM-X 惯性位置跟踪器自由度多少
jujiubird1年前1
-
地球指针 共回答了22个问题
|采纳率90.9%自由度:3(偏移、倾斜/摇摆)
角方位:满360°——所有轴
最大速率:300°/秒
精度(RMS):偏移0.3°、倾斜0.5°、摇摆25°1年前查看全部
- 计量经济学选择题,有关分布滞后模型的自由度问题
计量经济学选择题,有关分布滞后模型的自由度问题
分布滞后模型Y=a+b0Xt+b1Xt-1+b2Xt-2+b3Xt-3+u中,为了使模型的自由度达到30,必须拥有多少年的观测资料?
A.32 B.33 C.34 D.38
网上有答案是D,但是不清楚怎么得到的,还有的版本是35~~~晕~这个自由度到底怎么看的啊
意义一一41年前1 -
宋红研 共回答了25个问题
|采纳率88%的确是选D。必须需要38年才可以。首先,自由度 = n - k,模型有5个变量,k = 5。所以,乍一看,只要n = k+ 30 = 35就可以了。但是,别忘了,这题是滞后模型,X有3个滞后项。如果仅仅是35年的话,我们只知道Xt的数值...1年前查看全部
- 已知(n-1)×s²÷σ²服从自由度为n-1的咖方分布,推出s²的概率密度函数
已知(n-1)×s²÷σ²服从自由度为n-1的咖方分布,推出s²的概率密度函数zerg12131年前0
-
共回答了个问题
|采纳率
大家在问
- 1夜空中闪闪发亮的星星(包括各波段天文望远镜能看到的范围)有可能是哪些天体?它们发光的能量来源是什么?
- 2帮忙解决道应用题小王想买一只随身听和一只书包,他跑了A、B两家超市,发现他看中的随身听和书包的单价在这两家超市分别相同,
- 3just one more call为什么翻译成一个又一个电话?one “just”有多少用法?
- 4古希腊数学家把数1,3,6,10,15,21,……叫做三角数,它有一定的规律性.若把第一个三角形数记为a1,第二个
- 5There will be a basketball match this evening on TV 变疑问句并肯否回
- 6求导题 已知f(x)=ax*3+bx*2+cx (a不等于0) 在x=正负1处取得极值
- 7第一问如何不用三角函数的情况下做出来列了好几个方程了连接E'E 设E'E为X AE&
- 8过抛物线y2=4x的焦点作直线交抛物线于A(x1,y1)B(x2,y2)两点,如果x1+x2=6,那么|AB|=( )
- 9no see you later是什么意思?
- 10经济法 急 急 急 高分哦 问1 被告发出的要约能否撤回 问2 被告发出的要约等否撤回
- 11一条人行道,如果用边长4分米的方砖铺地,需要180块.如果用边长3分米的方砖铺地,需要多少块?
- 12f(x)=sin(πx^2)(-1
- 13关于座位的数学题排数 1 2 3 4……座位数 50 53 56 59……问:第n牌有多少座位
- 14已知函数F(X)=(M-1)X平方+3X+(2-N)为奇函数,求MN
- 15in the place of 和 in place of的区别